

Apprendre le codage

Voiture intelligente

Ci-dessus l’aperçu du résultat à obtenir
Résultat attendu :
Dans un futur proche, des voitures “intelligentes” rouleront sans pilote….
- Le véhicule se déplace seul en suivant sa route.
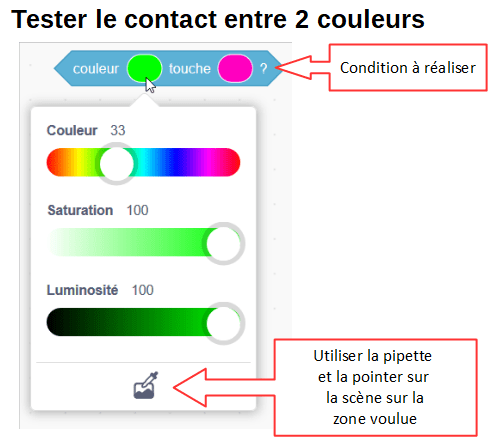
- Deux capteurs rouge et vert lui permettent de corriger sa trajectoire.
Pour vous aider :
- Au clic sur drapeau vert :
- Faire glisser le véhicule dans la zone de départ (-120,90)
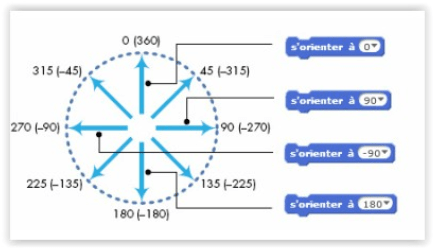
- Orienter le véhicule dans le sens du déplacement
- Déplacements :
- Un clic sur le bouton go (ou le toucher sur une tablette) l’envoi du message appelé GO
- La réception du message Go provoque le déplacement automatique du véhicule de quelques pas (1 à 5 p) (vous adapterez la vitesse ensuite)
- Le véhicule dispose de deux capteurs (rouge et vert) qui permettent de déceler les zones extérieures à la route afin de corriger sa trajectoire.
- Trouver le meilleur compromis vitesse/angle de rotation afin qu’il avance le plus rapidement possible.
Voiture intelligente

Ci-dessus l’aperçu du résultat à obtenir
Résultat attendu :
Dans un futur proche, des voitures “intelligentes” rouleront sans pilote….
- Le véhicule se déplace seul en suivant sa route
- Deux capteurs rouge et vert lui permettent de corriger sa trajectoire
- Un compteur affiche le nombre de tours effectués, au 5e tour il s’arrête.
Pour vous aider :
Au clic sur drapeau vert : faire un script
– Faire glisser le véhicule dans la zone de départ (-120,90)
– Orienter le véhicule dans le sens du déplacement
– Mettre le compte-tours à zéro
Déplacements : faire un script à part
- Un clic sur le bouton go (ou le toucher sur une tablette) l’envoi du message appelé GO
- La réception du message Go provoque le déplacement du véhicule de quelques pas (1 à 5 p) (vous adapterez la vitesse ensuite)Un appui sur la barre d’espace du clavier provoque le déplacement automatique du véhicule de quelques pas (1 à 5 p) (vous adapterez la vitesse ensuite)
- Le véhicule dispose de deux capteurs (rouge et vert) qui permettent de déceler les zones extérieures à la route afin de corriger son déplacement.
- Trouver le meilleur compromis vitesse/angle de rotation afin qu’il avance le plus rapidement possible.
Comptage des tours : faire un script à part qui démarre dès le clic sur le drapeau vert
- faire un test sur le franchissement de la ligne d’arrivée (par exemple lorsque le capteur vert touche la ligne noire)
- si la ligne noire est franchie il faut ajouter 1 au nombre de tours
- (Ajouter une attente de 1 seconde dans le script du comptage (pour qu’un seul tour soit compté à chaque franchissement de ligne)
- répéter indéfiniment
Ces consignes ci-dessus ne sont qu’indicatives car plusieurs solutions sont possibles
Voiture intelligente

Ci-dessus l’aperçu du résultat à obtenir
Dans un futur proche, des voitures “intelligentes” rouleront sans pilote….
- Le véhicule se déplace en suivant sa route
- Deux capteurs rouge et vert lui permettent de corriger sa trajectoire
- Un compteur affiche le nombre de tours effectués, au 5e tour il s’arrête.
- A chaque tour la vitesse du robot augmente d’un pas
Pour vous aider :
Au clic sur drapeau vert :
– Positionner le véhicule dans la zone de départ (-120,90)
– Orienter le véhicule dans le sens du déplacement
– Mettre le compte-tours à zéro
– Montrer la variable compte-tours
– Mettre la variable vitesse à 2
– Montrer la variable vitesse
Déplacements :
- Un clic sur le bouton go (ou le toucher sur une tablette) l’envoi du message appelé GO
- La réception du message Go provoque le déplacement du véhicule de quelques pas (1 à 5 p) (vous adapterez la vitesse ensuite)
Alerte sonore : chaque détection de bord de route doit être signifiée par un avertissement sonore :
– Détection du bord gauche de la route, le son “pop” doit être entendu
– Détection du bord droit de la route, le son “boing” doit être entendu
Comptage des tours :
– Ajouter une attente de 1 seconde dans le script du comptage (pour qu’un seul tour soit compté à chaque franchissement de ligne)
Augmentation de la vitesse :
– à chaque tour effectué, la vitesse doit augmenter de 1 pas (ajouter 1 à la variable vitesse)