

Programmer des robots

Comment suivre un itinéraire ?
- en suivant fidèlement une ligne
Document ressources : utiliser le capteur suiveur de ligne de Mbot
En prenant exemple de la vidéo ci-dessus, réaliser le programme qui permettra au robot d’avancer en suivant la ligne. 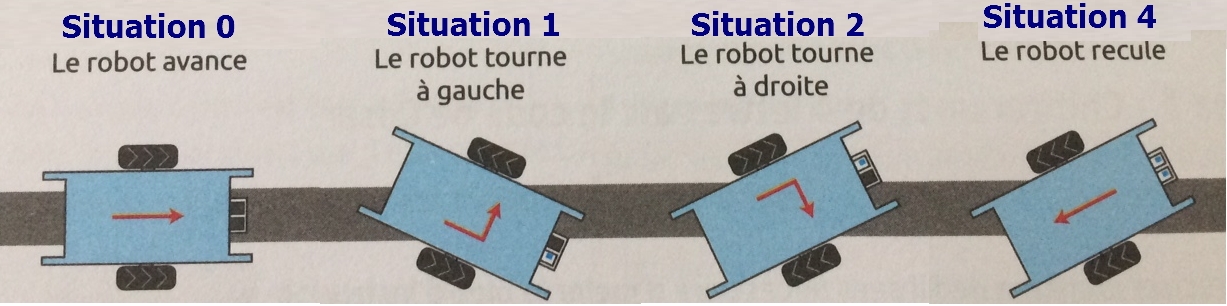
- A l’appui sur le bouton de la carte, les dels allument bleu 1s
- tant que le robot suit la ligne, il avance à 50% de puissance
- Si un des deux capteurs détecte un sortie de ligne, le robot tourne (50%) pour rétablir la trajectoire
- S’il quitte complétement la ligne, il recule à 50% de puissance
Quelques blocs utiles (à dupliquer si besoin) :

Correction