
Les défis Scratch

Avant de vous lancer…
Robot tondeuse

Réalisable sur tablette
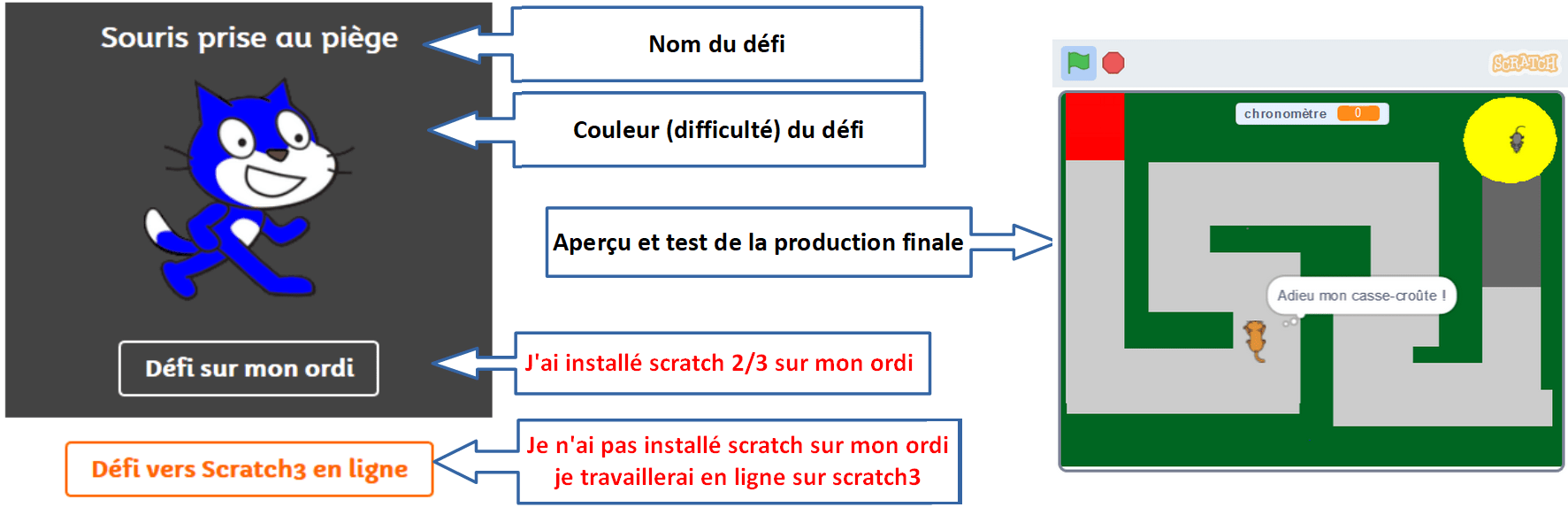
Ci-dessus l’aperçu du résultat à obtenir
Résultat attendu :
- Créer une animation qui simule le déplacement d’un robot tondeuse.
- Celui-ci doit reculer puis tourner pour éviter un obstacle (arbre, puits…)
- La manoeuvre doit être semblable lorsqu’il détecte le mur ceinturant la pelouse.
Pour vous aider :
- Conditions de départ : au clic sur le drapeau vert
- Relever le stylo (matérialise la trace laissée par la tondeuse)
- effacer tout
- mettre la tondeuse au point de départ (station de charge) au point y=-200; x=-120
- orienter la tondeuse vers le nord
- Attendre 2s
- mettre le stylo en position d’écriture
- mettre la couleur du stylo à vert clair
- mettre la taille du stylo à 20
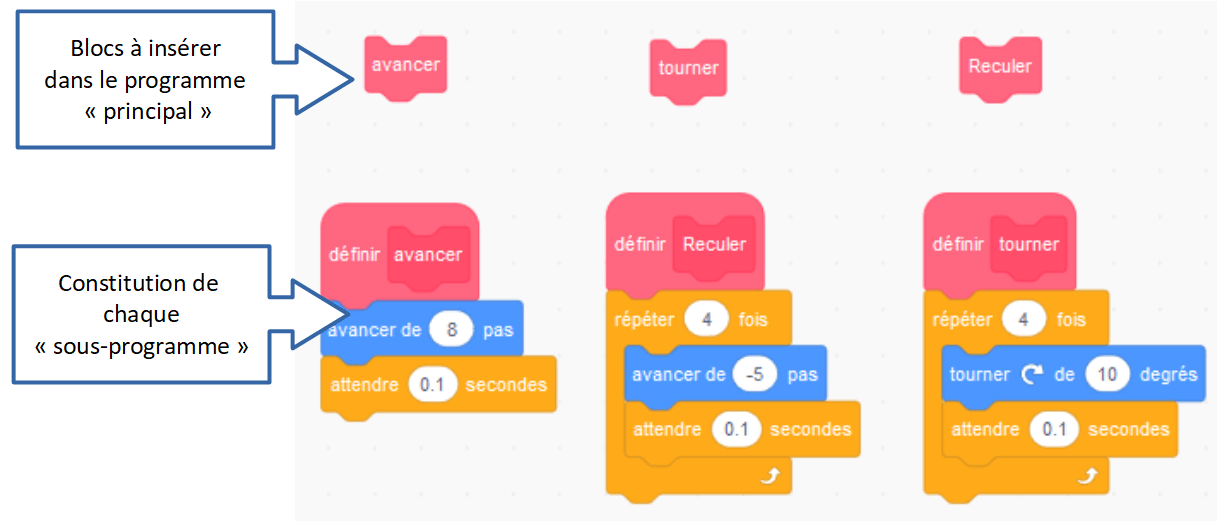
Déplacement de le la tondeuse :
-
- La tondeuse se déplace à la vitesse de 8 pas (sous-programme déjà réalisé)
- lorsque la tondeuse détecte un obstacle (mur, puits …) (bord noir de la tondeuse) elle doit reculer puis tourner progressivement d’un angle total de 40 degrés et reprendre son déplacement
Robot tondeuse

Ci-dessus l’aperçu du résultat à obtenir
Résultat attendu :
- Après avoir réalisé le défi bleu ci-dessus, on s’aperçoit que le robot demeure “coincé” dans un coin du terrain don il a du mal à sortir.
- Ce défi se fait donc avec un robot cette fois muni de 2 capteurs de contact (bleu et jaune)
- Faire le script en tenant compte de ces nouveaux capteurs : un contact à gauche provoquera le recul du robot et sa rotation à droite avant de repartir, un contact à droite provoquera le recul du robot et sa rotation à gauche avant de repartir
Pour vous aider :
- Conditions de départ : au clic sur le drapeau vert
- Relever le stylo (matérialise la trace laissée par la tondeuse)
- effacer tout
- mettre la tondeuse au point de départ (station de charge) au point y=-200; x=-120
- orienter la tondeuse vers le nord
- Attendre 2s
- mettre le stylo en position d’écriture
- mettre la couleur du stylo à vert clair
- mettre la taille du stylo à 20
- Déplacements :
- réaliser les sous-programmes : tourner à D et tourner à G
- Insérer les blocs du même nom dans le programme principal.
Robot tondeuse

Ci-dessus l’aperçu du résultat à obtenir
Gestion de l’énergie :
Le robot tondeuse doit être autonome et anticiper sa décharge progressive :
- A 40% d’énergie restante il doit émettre un son de criket avertissant ainsi sa baisse de charge.
- A 30% d’énergie restante il doit glisser progressivement vers sa base afin de se recharger.
Pour vous aider :
Au clic sur drapeau vert :
– Mettre la variable énergie à 100
– Toutes les 2s l’énergie du robot baisse de 5
Avertissement sonore et déplacements :